Siguiente: Condiciones de estabilidad para Subir: clases-t1 Anterior: Presión osmótica
Hemos dicho desde un comienzo que basamos nuestra teoría en el postulado de
máxima entropía, lo que significa que cuando un sistema arriba a un estado
de equilibrio debe cumplirse
![]() y
y
![]() . Si bien hemos impuesto
la primera condición en algunos ejemplos, no hemos explotado demasiado la
segunda, que es la que determina la estabilidad de los estados de equilibrio
predichos.
. Si bien hemos impuesto
la primera condición en algunos ejemplos, no hemos explotado demasiado la
segunda, que es la que determina la estabilidad de los estados de equilibrio
predichos.
Las consideraciones que pueden hacerse sobre estabilidad conducen a algunas de las predicciones más interesantes de la termodinámica, como lo son las transiciones de fase, tema que analizaremos apasionadamente en el próximo capítulo.
Supongamos dos sistemas gaseosos simples idénticos descriptos mediante
cierta relación fundamental ![]() . Imaginemos estos sistemas en un
recipiente, separados por una pared completamente restrictiva (adiabática,
rígida e impermeable a la materia), ambos inicialmente en el mismo estado descripto por
. Imaginemos estos sistemas en un
recipiente, separados por una pared completamente restrictiva (adiabática,
rígida e impermeable a la materia), ambos inicialmente en el mismo estado descripto por ![]() ,
, ![]() y
y ![]() . Para mostrar que
. Para mostrar que ![]() no puede ser una
función convexa de
no puede ser una
función convexa de ![]() consideremos la situación en que fluyera cierta
cantidad
consideremos la situación en que fluyera cierta
cantidad ![]() de uno de los sistemas al otro. Si el estado inicial
de cada sistema se halla en la región convexa, tendríamos
de uno de los sistemas al otro. Si el estado inicial
de cada sistema se halla en la región convexa, tendríamos
|
Esto significa que si removiéramos la adiabaticidad de la pared divisoria, el sistema conjunto ``elegiría'' trasladar energía de una región a otra para aumentar su entropía. Pero entonces el estado original no es de equilibrio, ya que el sistema espontáneamente crearía inhomogeneidades internas, contradiciendo la noción que tenemos sobre equilibrio termodinámico. Casualmente estas inhomogeneidades son las que hallaremos cuando analicemos una transición de fase.
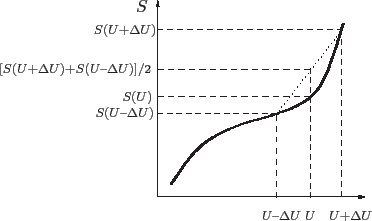
La condición para la estabilidad global de los estados termodinámicos es entonces la concavidad de
|
|
![\begin{displaymath}
\fbox{ $\displaystyle S(U+\Delta U,V,n) + S(U-\Delta U...
...\qquad \forall\; \Delta U\;. \rule[-1.75em]{0em}{4em} $ }
\end{displaymath}](img711.png)
En el caso en que tomamos ![]() , esta condición se transforma en una restricción ``local''
, esta condición se transforma en una restricción ``local''
El mismo razonamiento puede repetirse dejando constante ![]() en cada
subsistema y permitiendo que haya variaciones en los volúmenes, manteniendo
siempre el volumen total constante. Así llegamos a una condición que
involucra las variaciones
en cada
subsistema y permitiendo que haya variaciones en los volúmenes, manteniendo
siempre el volumen total constante. Así llegamos a una condición que
involucra las variaciones ![]() , o
, o ![]() para un sistema
general:
para un sistema
general:
![\begin{displaymath}
\fbox{ $\displaystyle S(U,X+\Delta X,n) + S(U,X-\Delta...
... \qquad \forall\;\Delta X\;. \rule[-1.75em]{0em}{4em} $ }
\end{displaymath}](img716.png)
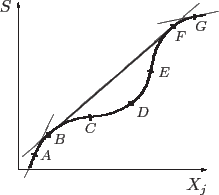
En realidad suele suceder que, a partir de cálculos estadísticos o de interpolaciones a observaciones experimentales, se obtienen ecuaciones fundamentales que no satisfacen las condiciones de estabilidad deducidas aquí. En esos casos la ecuación fundamental estable se construye con la envolvente de las tangentes que pasan siempre por encima de la curva (tangentes superiores). Así es que en el ejemplo de la figura siguiente se reemplaza entonces el tramo BCDEF por el segmento recto que une ![]() con
con ![]() .
.
|
Si bien esta construcción puede parecer caprichosa, no lo es (¡no, no, no y
no!). Para ver que no es tan arbitraria, basta pensar que todos los estados
que quedan empalmados con el segmento recto no tienen problemas de
estabilidad, y al arribar a los puntos Vale la pena resaltar que sólo los estados compren-
|
|
didos en el tramo CDE no satisfacen los requisitos de estabilidad local; en el tramo BC y EF los estados son ``localmente estables'', pero ``globalmente'' inestables.
Un punto en el segmento recto BF corresponde a una mezcla de
sistema: parte del mismo está en el estado ![]() y el resto, en el estado
y el resto, en el estado
![]() ; esto es lo que se observa como separación de fases y será
motivo de análisis en el próximo capítulo.
; esto es lo que se observa como separación de fases y será
motivo de análisis en el próximo capítulo.
Si consideramos simultáneamente a las variables ![]() y
y ![]() , el criterio de
estabilidad implica
, el criterio de
estabilidad implica